Урок 6
Информация и управление. Системный подход. Информационное общество
(§4. Информация и управление. §5. Информационное общество)
Содержание урока
§4. Информация и управление
Системы управления
§5. Информационное общество
§4. Информация и управление
Системы управления
Во многих системах взаимодействие между подсистемами можно рассматривать как управление. Такие системы (их называют системами управления) всегда содержат управляющий объект (в теории управления его называют регулятором) и управляемый объект (просто «объект»). Цель управления чаще всего задаётся извне, т. е. регулятор является только исполнителем. Например, водитель служебной машины никогда не решает сам, куда везти своего начальника.
Регулятор действует на объект (управляет им) так, чтобы цель была достигнута (рис. 1.12).
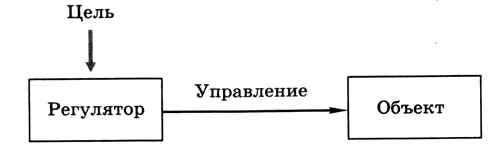
 Управление (управляющее воздействие) — это сигнал, который поступает от регулятора к объекту. Это значит, что при управлении передается информация.
Управление (управляющее воздействие) — это сигнал, который поступает от регулятора к объекту. Это значит, что при управлении передается информация.
На приведённой схеме (см. рис. 1.12) регулятор не получает никакой информации о состоянии объекта, т. е. действует «вслепую». Такие простейшие системы управления называют разомкнутыми, в них информация идет только в одну сторону, от регулятора к объекту. Приведём некоторые примеры разомкнутых систем:
• светофор (выдаёт вам световой сигнал, но не получает информации от вас);
• табло на вокзале или в аэропорту;
• процессор выставляет данные для записи в ОЗУ на шину, ждёт некоторое время и затем, без всякого подтверждения от ОЗУ, продолжает работу (считается, что ОЗУ работает надёжно и за это время данные всегда записываются);
• начальник отдаёт приказания, но не проверяет их выполнение.
Разомкнутые системы используются в двух случаях. Во-первых, когда регулятору всё равно, реагирует ли объект на управление (светофор, табло). Во-вторых, когда регулятор настолько хорошо знает объект (имеет точную модель объекта), что уверен в выполнении своих команд. Например, начальник, уверенный в исполнительности своих подчинённых, может позволить себе (иногда) не контролировать их.
Достоинство разомкнутых систем — в их простоте. Например, во многих случаях частоту вращения электродвигателя регулируют простым реостатом, при этом не нужно ставить сложный и дорогостоящий датчик частоты вращения.
В ответственных случаях разомкнутые системы лучше не применять, потому что они имеют серьезные недостатки:
• для достижения цели регулятор должен иметь точную модель объекта; на практике такая модель чаще всего неизвестна;
• на объект всегда действует внешняя среда, и из-за этого воздействия свойства объекта могут непредсказуемо меняться; регулятор в разомкнутой системе не получает об этом никакой информации.
Даже очень исполнительные работники могут в какой-то момент «схалтурить» из-за личных переживаний или неурядиц. Поэтому в разомкнутых системах чаще всего нельзя гарантированно достичь цели управления, т. е. решить поставленную задачу.
Для достижения цели регулятор должен получать информацию от объекта. Этот канал передачи информации называют обратной связью, потому что по нему информация передаётся (с помощью датчиков) в обратном направлении, от объекта к регулятору (рис. 1.13). Системы с обратной связью называют замкнутыми системами управления, потому что информация передаётся по замкнутому контуру, циклически.
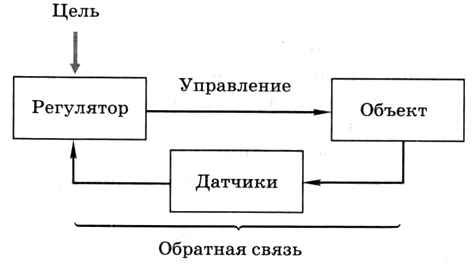
Задача регулятора — сравнить поставленную цель и реальное состояние объекта, а потом выдать нужный управляющий сигнал. Если цель достигнута, как правило, сигнал управления больше не изменяется.
Например, регулировщик, управляющий движением на перекрёстке, использует обратную связь. Он оценивает (с помощью глаз-датчиков) количество машин, движущихся в разных направлениях, и «открывает» то или другое направление. Человек управляет лучше, чем светофор, потому что учитывает реальную обстановку, которая может изменяться непредсказуемо.
Чаще всего реальные системы управления (в природе, технике, обществе) — это замкнутые системы. Они обладают несомненными достоинствами:
• могут решать задачу даже тогда, когда модель объекта неточна или свойства объекта изменяются во времени;
• позволяют учитывать случайные воздействия внешней среды.
За это приходится расплачиваться усложнением системы — нужны датчики, которые передают информацию от объекта.
Представьте себе, что в тёмной комнате упала на пол пуговица, и вы не слышали, как она стукнулась. Сказать точно, где лежит пуговица, не сходя с места, невозможно, потому что вы этого не знаете (модель неточна). Вы можете попробовать искать её на ощупь (используя обратную связь — осязание). Если и это не получается, можно включить свет (зрительная обратная связь даёт больше информации), и тогда пуговица точно будет найдена (если она, конечно, там есть). В этом примере датчиками служат наши органы чувств.
Системы с обратной связью широко используются в технике. Это, например, автопилоты на самолётах и судах, регуляторы частоты вращения турбин, роботы, оборудованные датчиками (в том числе устройствами «компьютерного зрения»).
Обратная связь существует и в обществе. Жалобы граждан должны помогать работе органов управления, сигнализируя о том, что не всё в порядке. Не зря все официальные учреждения имеют контактные телефоны и сайты в Интернете, с которых можно отправить сообщение с просьбой или предложениями по их работе.
Обратная связь, при которой регулятор стремится уменьшить разницу между заданной целью и фактическим состоянием объекта, называется отрицательной.
Системы управления делятся на автоматические и автоматизированные. Автоматические системы работают без участия человека, например автопилот. В автоматизированных системах сбор и предварительную обработку информации выполняет компьютер, а решение по поводу управления принимает человек.
Многие системы умеют «подстраиваться» под изменения внешних условий или изменение свойств объекта управления. Они называются адаптивными. Классическая адаптивная система — глаз человека, который изменяет диаметр зрачка в зависимости от освещённости. В технических системах адаптивные регуляторы могут управлять объектом, модель которого очень плохо известна или меняется. Они параллельно решают две задачи — управляют и уточняют имеющуюся модель, что, в свою очередь, позволяет улучшить управление.
Следующая страница  Вопросы и задания
Вопросы и задания
Cкачать материалы урока
Управляющие сигналы
16. Управляющие сигналы
Сигналы для пуска и контроля выполнения функций ФЕ(П) ИИС. Управляющие сигналы подразделяются на командные и контрольные
Смотреть что такое «Управляющие сигналы» в других словарях:
управляющие сигналы — Сигналы, передаваемые между различными частями коммуникационной системы как часть механизма управления системой (например, сигналы RTS, DTR или DCD). [http://www.lexikon.ru/dict/net/index.html] Тематики сети вычислительные EN control signals … Справочник технического переводчика
СТ СЭВ 1610-79: Приборы электронные измерительные. Интерфейс НИС-1. Логические и электрические условия, информационные, управляющие и программные сигналы — Терминология СТ СЭВ 1610 79: Приборы электронные измерительные. Интерфейс НИС 1. Логические и электрические условия, информационные, управляющие и программные сигналы: 12. Аналоговый сигнал Сигнал, связанный с информацией о представляемой… … Словарь-справочник терминов нормативно-технической документации
Командные сигналы (В-сигналы) — 17. Командные сигналы (В сигналы) Управляющие сигналы, подаваемые на ФЕ(П) и вызывающие выполнение определенной функции в ФЕ(П) Источник … Словарь-справочник терминов нормативно-технической документации
Контрольные сигналы (М-сигналы) — 18. Контрольные сигналы (М сигналы) Управляющие сигналы, выдаваемые ФЕ(П) и определяющие ее состояние Источник … Словарь-справочник терминов нормативно-технической документации
ГОСТ 21835-84: Устройства коммутационной техники связи управляющие. Термины и определения — Терминология ГОСТ 21835 84: Устройства коммутационной техники связи управляющие. Термины и определения оригинал документа: 31. Асинхронный режим работы программного управляющего устройства коммутационной техники связи Режим работы программного… … Словарь-справочник терминов нормативно-технической документации
Информационные сигналы (1-сигналы) — 15. Информационные сигналы (1 сигналы) Электрические сигналы, несущие информацию о величине или состоянии исследуемого объекта или процесса Источник … Словарь-справочник терминов нормативно-технической документации
Программные сигналы (Р-сигналы) — 19. Программные сигналы (Р сигналы) Сигналы, определяющие режим работы ФЕ(П), а также алгоритм обработки информационных сигналов без непосредственного влияния на пуск Источник … Словарь-справочник терминов нормативно-технической документации
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
часть — 3.7 часть (part): Часть исследуемой системы. Примечание Часть может быть физической (например, аппаратные средства) или логической (например, шаг в последовательности операций). Источник: ГОСТ Р 51901.11 2005: Менеджмент риска. Исследование… … Словарь-справочник терминов нормативно-технической документации
КОМПЬЮТЕР — устройство, выполняющее математические и логические операции над символами и другими формами информации и выдающее результаты в форме, воспринимаемой человеком или машиной. Первые компьютеры использовались главным образом для расчетов, т.е.… … Энциклопедия Кольера
управляющий сигнал
3.26 управляющий сигнал (control signal): Сигнал напряжения переменного или постоянного тока, который путем аналоговых, цифровых или других средств может быть модулирован для получения и передачи информации с пускорегулирующего аппарата.
Смотреть что такое «управляющий сигнал» в других словарях:
управляющий сигнал — сигнал управления — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия Синонимы сигнал управления EN actuating… … Справочник технического переводчика
управляющий сигнал — valdymo signalas statusas T sritis fizika atitikmenys: angl. control signal; driving signal; pilot signal vok. Steuersignal, n; Treibersignal, n rus. ведущий сигнал, m; сигнал управления, m; управляющий сигнал, m pranc. signal de commande, m … Fizikos terminų žodynas
управляющий сигнал — valdymo signalas statusas T sritis automatika atitikmenys: angl. command signal; control signal; driving signal; pilot signal vok. Schaltsignal, n; Steuersignal, n; Treibersignal, n rus. управляющий сигнал, m pranc. signal commande, m; signal de… … Automatikos terminų žodynas
управляющий сигнал промышленной частоты — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN line frequency control signal … Справочник технического переводчика
сигнал управления — управляющий сигнал — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы управляющий сигнал EN control signal … Справочник технического переводчика
сигнал готовности к передаче — Управляющий сигнал, передаваемый модему от DTE, который говорит что DTE имеет данные для передачи. [http://www.morepc.ru/dict/] Тематики информационные технологии в целом EN Request To SendRTS … Справочник технического переводчика
сигнал подтверждения приема — квитанция Управляющий сигнал, который информирует, что принятый блок данных не содержит ошибок [Л.М. Невдяев. Телекоммуникационные технологии. Англо русский толковый словарь справочник. Под редакцией Ю.М. Горностаева. Москва, 2002] Тематики… … Справочник технического переводчика
сигнал управления — valdymo signalas statusas T sritis fizika atitikmenys: angl. control signal; driving signal; pilot signal vok. Steuersignal, n; Treibersignal, n rus. ведущий сигнал, m; сигнал управления, m; управляющий сигнал, m pranc. signal de commande, m … Fizikos terminų žodynas
управляющий свип-сигнал — — [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN linear sweep … Справочник технического переводчика
управляющий цифровой сигнал — — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом EN digital control signal … Справочник технического переводчика
Управляющие сигналы (УС), их параметры и спектры. Импульсные управляющие сигналы (ИУС)
НЧ сигналы, несущие информацию (изменяющиеся по закону передаваемого сообщения) и используемые для модуляции ВЧ называются УС. По форме различают НУС и импульсные УС.
Совокупность гармонических колебаний, на которые можно разложить сложный сигнал, назыв. спектром этого сигнала, различают амплитудно-частотный (АЧС) и фазо-частотный спектр (ФЧС).
Для построения АЧС по оси абсцисс откладываются частоты гармонических колебания, образующих спектр, по оси ординат – из этих точек строят ┴ отрезки, длины которых пропорц. амплитуде соотв. гармонических составляющих. ФЧС – аналогично АЧС. Спектр сигналов дает достаточно ясное представление об этих сигналах. ФЧС не рассматривается, а вместо термина «АЧС» используется «спектр».
Спектры однотонального и многотонального сигнала имеют вид

Спектр сложного многотонального сигнала богаче однотонального и занимает полосу частот. Ширина этой полосы (ширина спектра ∆fC), позволяет сравнивать различные виды управляющих сигналов, которые подразделяются на широкополосные и узкополосные.
Для различных сигналов величина ∆fC определяется по-разному. Если спектр сигнала ограничен частотой тона fmax и fmin, то ∆fC находится по формуле ∆fC= fmax – fmin
Если спектр сигнала имеет неограниченную ширину, то в этом случае пользуются понятием активной ширины спектра – полоса частот, охватывающая наиболее интенсивные гармоники, в пределах которых содержится 95% энергии всего сигнала. Ширина спектра является важной характеристикой сигнала, она определяет полосу пропускания цепей, по которым передается сигнал.
Звуковой многоканальный сигнал, восприним. ухом чела имеет полосу частот 16 Гц ÷ 20 кГц и считается узкополосным. ТВ сигнал имеет частоты от 10-ов Гц до 4-5 МГц и явл. широкополосным.
ИУС применяются в р/связи для управления сигналами ВЧ, для кодирования и преобразования информации. По форме различают импульсы прямоугольной, трапецеидальной, пилообразной и экспоненциальной формы.
Осн. параметрами импульсов и их последовательностей явл. амплитуда Um, длительность tИ, длительности фронта и среза tФ и tC, период повторения ТП, частота повторения FП=1/ТП, скважность Q=ТП/tИ, коэф. заполнения γ=1/Q.
ИУС явл. широкополосными, в их состав входят множество гармоник, для которых трудно указать граничную частоту.

(2) имеет оч. важное значение в р/связи, т.к. полоса пропускания р/технич. устройства должна соответствовать ширине спектра обрабатываемого сигнала, иначе сигналы искажаются.
Согласно теор. Котельникова непрерывный сигнал U(t) с гармонич. составляющими от fmin до fmax полностью определяется его дискр. значениями, взятыми через интервалы времени Δt=1/(2fmax), т.о. происходить дискретизация сигнала или его квантование по времени (а можно по уровню или вместе).
Дискретизация существенно сокращает объем передаваемой информации. ИУС явл. основными видами сигналов в цифр. сигналах широкое использ. в совр. в системах связи.
9. Р/сигналы, их параметры и спектры. Непрерывные р/сигналы
Р/сигналы представляют собой модулированные ВЧ колебания, описываемые функцией: U(t)=Um∙cos(ωt-φ). Такая функция характеризуется тремя независимыми параметрами – амплитудой Um, частотой ω и начальной фазой φ. Следовательно, модулирование гармонических колебаний можно осуществить изменением во времени любой из 3 величин.
Процесс, при котором амплитуда ВЧ колебания изменяется по закону управляющего сигнала, наз. амплитудной модуляцией (АМ). Если по закону управляющего сигнала меняется начальная фаза ил частота, то модуляции соответственно называется фазовой или частотной. Р/сигналы, м.б. непрерывные (НРС) и импульсные (ИРС).
НРС. При АМ одним тоном р/сигнал представляет собой ВЧ сигнал несущей частоты fH, амплитуда которого изменяется по гармоническому закону с непрерывной частотой F 

10. Р/сигналы, их параметры и спектры. Импульсные р/сигналы
Р/сигналы представляют собой модулированные ВЧ колебания, описываемые функцией: U(t)=Um∙cos(ωt-φ). Такая функция характеризуется тремя независимыми параметрами – амплитудой Um, частотой ω и начальной фазой φ. Следовательно, модулирование гармонических колебаний можно осуществить изменением во времени любой из 3 величин.
Процесс, при котором амплитуда ВЧ колебания изменяется по закону управляющего сигнала, наз. амплитудной модуляцией (АМ). Если по закону управляющего сигнала меняется начальная фаза ил частота, то модуляции соответственно называется фазовой или частотной. Р/сигналы, м.б. непрерывные (НРС) и импульсные (ИРС).
ИРС получаются при АМ колебаний ВЧ импульсными управляющими сигналами и имеют вид:

Спектр последовательности прямоуг. импульсов содержит ∞ множество составляющих частоты, которые распространяются до ∞. В энергетическом отношении осн. роль играют составляющие, находящиеся в пределах активной ширины спектра, которая содержит 95% всей энергии.
Амплитудно-частотный спектр р/импульса образуется смещением спектра управляющего импульса по оси частот на расстояние несущей частоты от начала координат.

Помехи радиоприему
Гл. метод борьбы с ПП – их снижение в месте возникновения.
Для борьбы с внутренними помехами во входных цепях применяют малошумящие элементы и использ. разл. методы обработки сигналов.
Проблема ЭМ–совместимости возникает из-за большого числа р/электронной аппаратуры. Для исключения посторонних сигналов применяются фильтры для их подавления, селекция сигналов по направлению с использованием направленных антенн и др. меры. Борьба с преднамеренными помехами ведется применением различных технических методов обработки сигналов и выбором режима работы РЭА.
3. Входной сигнал запроса шины (захвата) HOLD — информирует МП о том, что быстродействующее периферийное устройство должно использовать шины адреса и данных для прямого обмена данными с памятью МП системы без участия МП. Реагируя на этот сигнал, МП приостанавливает выполнение программы и отключается от шин. Таким образом реализуется режим прямого доступа к памяти.
4. Выходной сигнал подтверждения запроса шин (захвата) HLDA — означает, что шинами данных и адреса может распоряжаться устройство, инициировавшее прямой доступ к памяти.
В) Группа сигналов, связанных с прерываниями, то есть с запросами периферийных устройств на обмен информацией:
1. Входной сигнал запроса прерывания INT — означает готовность периферийного устройства к обмену данными. Реагируя на этот сигнал, МП прерывает выполнение текущей программы, временно запоминает ее состояние, обслуживает периферийное устройство (обменивается с ним данными), после чего восстанавливает прежнее состояние и возобновляет выполнение прерванной программы.
2. Выходной сигнал разрешения прерывания INTE — определяет возможность или невозможность обслуживания микропроцессором запросов периферийных устройств. Этим сигналом можно управлять программно: с помощью команд EI — прерывание разрешено и DI — прерывание запрещено.
Г) Группа сигналов синхронизации:
1. Выходной сигнал SYNC — идентифицирует начало каждого машинного цикла, в течение которого МП адресуется к внешнему регистру, обменивается с ним данными и при необходимости производит внутреннее преобразование данных. Одновременно с сигналом SYNC МП выдает на шину данных байт состояния, содержащий информацию о действиях МП в текущем машинном цикле.
2. Тактовые сигналы C1, C2 — двухфазные неперекрывающиеся сигналы от генератора тактовых импульсов. Они определяют моменты выполнения большинства действий в МП системе.
4. Принцип работы МП
Из МП на шину адреса выдается адрес очередной команды. Команда, считанная по этому адресу из памяти, поступает на шину данных и принимается МП, где она исполняется. В счетчике команд в это время формируется адрес следующей команды. После окончания исполнения данной команды на шину адреса поступает адрес следующей команды и т. д. При исполнении команды могут потребоваться дополнительные обращения к памяти для вызова в микропроцессор дополнительных байтов команды (в случае двух- и трехбайтовых команд), операндов или для записи в память числа, выдаваемого из микропроцессора.
Процесс выполнения команды разбивается на циклы M1…M5. В каждом цикле производится одно обращение МП к памяти или устройству ввода-вывода (за исключением команды DAD). В зависимости от типа команды она может выполняться за разное число циклов (от 1 до 5).
Каждый цикл, в свою очередь, состоит из нескольких тактов — от 3 (T1…T3) до 5 (T1…T5). Первые 3 такта во всех циклах используются для организации обмена с памятью или устройством ввода-вывода, такты T4, T5 (если они присутствуют) — для выполнения внутренних операций в МП.
Отсчет тактов производится от положительных фронтов импульсов C1.