В США беспилотникам разрешили передвигаться по общественным дорогам без присмотра людей
Речь, правда, идет не о всей территории США, а только о штате Флорида, где местный губернатор Рон Десантис подписал закон, устраняющий большинство препятствий на пути технологических компаний, желающих вывести по-настоящему автономные транспортные средства в реальные дорожные условия, а не на полигоны. Начиная с 1 июля 2019 года автопроизводителям и технологическим компаниям будет позволяться проводить испытания беспилотных автомобилей на дорогах общего пользования без необходимости контроля со стороны человека, готового в любой момент перехватить управление транспортным средством на себя.

Какое будущее ждет беспилотные автомобили?
По словам Десантиса, «новый закон делает штат Флорида самым открытым для беспилотных транспортных средств».
Как отмечается, единственным условием является соответствие прототипов основным правилам дорожной безопасности и наличие страховки. Так, если в испытываемой машине находится оператор, то в случае неполадок автомобиль может продолжать движение, включив аварийные огни. Если неполадки произойдут в момент, когда в салоне нет человека, автомобиль должен уметь самостоятельно и безопасно съехать к обочине и остановиться.
Важно также отметить, что в законе также четко прописано, что оператором транспортного средства будет считаться именно сама система беспилотного управления, при ее активации, даже если в этот момент в салоне авто будут находиться пассажиры. Таким образом штат накладывает повышенную ответственность на производителя системы в случае аварии. Таким образом, если что-то пойдет не так, как это было, например, в инциденте 2018 года, когда беспилотный автомобиль Uber насмерть сбил пешехода, компании-производителю не удастся отвертеться от ответственности словами вроде «просто наш водитель был невнимателен».
В то же время, как сообщает Digital Trends, для беспилотников отменяются некоторые правила дорожного движения, действующие во Флориде. Например, их операторам можно пользоваться смартфонами и даже смотреть телепередачи, в то время, как водителям нормальных машин за такое поведение грозят серьезные штрафы и даже тюремное заключение.
По мнению местных законодателей, подобные исключения помогут технологическим компаниям быстрее выполнить свои обещания по выводу технологии беспилотных транспортных средств на массовый рынок.
Закон, принятый во Флориде, стал прецедентным не только в США. Похоже, отмечают журналисты, это первый в мире правовой документ, допускающий роботов к самостоятельному управлению транспортными средствами. Но это на самом деле не так. Например, не так давно мы сообщали о том, что в Швеции началась коммерческая эксплуатация полностью автономных грузовиков T-pod компании Einride. Они будут передвигаться между распределительными терминалами и складами компании логистической компанией DB Schenker. Разрешение на эксплуатацию грузовиков выдано вплоть до 31 декабря 2020 года.
Обсудить новость можно в нашем Telegram-чате.
Разработка беспилотных автомобилей в США столкнулась с новыми трудностями
После смертельного ДТП с беспилотным Volvo штаты не спешат выдавать разрешения на испытания, а американцы подписывают петиции против автомобилей без водителя

Сейчас на дорогах мира ежегодно гибнут более 1,3 млн человек, и в теории считается, что роботизация вождения должна снизить число таких смертей: автопилот не отвлекается, не устает и не употребляет алкоголь. Однако в США, где проводится значительный объем тестирования беспилотных машин, и власти, и сами компании осознали необходимость не спешить с испытаниями.
Одна из причин заключается в том, что роботы всегда следуют установленным правилам и не имеют возможности изменить модель поведения, когда другой участник дорожного движения нарушает правила, как это было в Аризоне.
Аризона запретила Uber тестировать беспилотники
С понедельника губернатор-республиканец Аризоны Даг Дьюси запретил проводить испытания беспилотных автомобилей на дорогах штата. Пока запрет действует только в отношении Uber. Однако особую значимость ему придает тот факт, что Дьюси ранее был ярым сторонником новой технологии и приветствовал появление самоуправляемых машин в Аризоне, пишет The Washington Post.
В конце 2016 года Uber перенесла испытания беспилотных такси в Аризону после того, как регуляторы штата Калифорния отозвали у нее регистрацию на самоуправляемые автомобили. Правила, регулирующие подобные испытания, в Аризоне мягче, чем в соседнем штате.
В середине марта текущего года эксплуатируемый Uber автомобиль Volvo XC90 сбил 49-летнюю женщину, которая переходила дорогу в пригороде Финикса Темпе (штат Аризона) вне пешеходного перехода. Пострадавшая Элейн Херзберг умерла в больнице. Полиция не нашла в происшествии признаков вины автомобиля Uber или водителя. Инцидент Uber стал первым известным ДТП, в котором причиной гибели пешехода стал беспилотный автомобиль.
Видеозапись инцидента «вызывает тревогу и беспокойство, а также множество вопросов о способности Uber продолжать испытания в Аризоне», отметил губернатор в открытом письме гендиректору Uber Даре Хосровшахи.
Как передает CNBC, отдельные вопросы у властей штата и федеральных регуляторов вызвало решение Uber сократить на беспилотных такси число датчиков, обеспечивающих обнаружение объектов на дороге.
Uber не будет возобновлять испытания в Калифорнии
На прошлой неделе Uber добровольно приостановила программы испытания беспилотных автомобилей в Сан-Франциско, Питтсберге, Финиксе и Торонто.
Во вторник пресс-служба компании объявила, что Uber приняла решение не обращаться за возобновлением лицензии на самоуправляемые автомобили в Калифорнии.
Примеру Uber в США последовали как минимум три другие компании. Toyota на прошлой неделе приостановила испытания режима Chauffer в Мичигане и Калифорнии. Cтартап NuTonomy поставил на паузу тестирование в Бостоне. Во вторник чипмейкер Nvidia Corp. приостановила собственные тесты автономных машин. Представитель компании Фазель Адаби объяснил это решение необходимостью понять, что именно пошло не так в аризонской аварии.
США начали новое расследование в отношении Tesla
Национальное управление безопасности дорожного движения (National Transportation Safety Board, NTSB) США направило экспертов в Калифорнию для проведения расследования ДТП с участием электромобиля Tesla, причиной которого могла стать полуавтоматическая система вождения Autopilot, пишет The Wall Street Journal. Водитель Tesla Model X погиб в результате аварии близ Маунтин-Вью в Калифорнии на прошлой неделе.
Tesla пообещала оказать помощь властям в проведении расследования.
Позже на сайте Tesla появился пост, в котором отмечалось, что из-за масштаба повреждений компания пока не может получить доступ к журналу бортового компьютера, чтобы понять причины аварии.
Международное рейтинговое агентство Moody’s Investors Service во вторник снизило кредитный рейтинг Tesla на одну ступень, с «B2» до «B3», уведя его еще глубже в спекулятивную зону. Прогноз остается «негативным», что говорит о возможности дальнейшего ухудшения оценки кредитоспособности. По мнению аналитиков агентства, Tesla потребуется существенное привлечение капитала в ближайшее время, чтобы погасить задолженность и избежать дефицита ликвидности. Кроме того, рейтинги учитывают существенное отставание темпов производства автомобилей Model 3 от ранее заявленного графика.
Несмотря на подчеркнутое внимание NTSB к другим аспектам ДТП Tesla в Калифорнии, американский дорожный регулятор все чаще сталкивается с необходимостью изучать роль беспилотных технологий, отмечает WSJ. Некоторые аналитики и конгрессмены говорят, что следует пересмотреть регулирование в связи с развитием отрасли.
Американцы боятся беспилотников
Почти две трети (63%) американцев опасаются поездок в полностью не зависящем от водителя автомобиле, свидетельствуют данные опроса, проведенного Американской автомобильной ассоциацией (AAA).
Гибель пешехода в Аризоне лишь усилит эти опасения, пишет агентство Bloomberg.
Велосипедисты Сан-Франциско уже направили властям Калифорнии петицию, в которой просят не допускать тестирования самоуправляемых автомобилей на улицах штата без водителей, поскольку существующие технологии пока недостаточно безопасны. При этом в случае аварии Uber в Аризоне водитель присутствовал в машине, но не успел перехватить управление.
В большинстве штатов США действует правило, согласно которому в ходе испытаний беспилотных автомобилей за рулем для подстраховки должен находиться человек. Калифорния в конце февраля отменила такое правило. Однако, как написала на этой неделе San Francisco Examiner, пока ни одна из компаний за такими разрешениями не обращалась.
На своем ходу. У Tesla начались проблемы в США. Как это повлияет на будущее беспилотных автомобилей?

Кадр: Florida 56 Авто из США / YouTube
Октябрь начался для Tesla с проблем. Американское Национальное управление безопасностью движения на трассах (NHTSA) потребовало от компании Илона Маска объяснить, почему она не отозвала свои автомобили после проблем с автопилотом, и дать оценку ситуации. Параллельно американские полицейские, на машину с которыми наехал электрокар Tesla, подали на автопроизводителя в суд. «Лента.ру» объясняет, с какими проблемами сталкиваются автомобили на беспилотном управлении и их создатели, а также рассказывает, какими будут автономные транспортные средства в будущем.
Одна из претензий в сторону Tesla заключается в непонимании. Если беспилотный режим на электрокарах существует, как утверждает автопроизводитель, в бета-версии, то почему компания не ограничит к нему доступ обычных пользователей? Внимательные автолюбители обращают внимание, что компания Маска называет свою технологию беспилотной — это можно увидеть и в рекламе, и на сайте компании. Однако на том же сайте Tesla мелким шрифтом указано, что данная технология предназначена лишь для помощи человеку за рулем. «Когда ожидания водителей превышают возможности их транспортных средств, возможны серьезные аварии со смертельным исходом», — отметили в своем обращении к Tesla американские сенаторы Эд Марки и Ричард Блюменталь.
Лукавство американской компании подтверждают и пользователи новой системы автономного вождения, которая красочно называется Full Self-Driving. Судя по названию, можно подумать, что авто может передвигаться без участия пользователей. Однако первые клиенты, которым открылась обновленная функция, рассказывают о некоторых нюансах. Так, при первом запуске система просит водителя поставить галочку напротив пункта о том, что он ознакомлен с ПДД, готов в любой момент взять управление на себя и нести полную ответственность за происходящее с его машиной.
Вы находитесь здесь
Практически в любом футуристическом фильме или сериале заметное место занимают беспилотные автомобили. Транспортные средства не только могут передвигаться без участия водителя, но часто даже не имеют руля и педалей. Подобные машины характеризуются пятым уровнем автономности — данную иерархию придумали в Обществе автомобильных инженеров (SAE). Всего таких уровней шесть. Согласно классификации, классические автомобили относятся к нулевому уровню. В данную категорию попадают даже машины, которые имеют различные средства экстренного торможения: фактически подобная система не управляет автомобилем, а лишь показывает уведомления и подает звуковые сигналы.
К первому уровню можно отнести авто, оснащенные различными системами помощи водителю. Среди них — адаптивный круиз-контроль, регулирующий скорость движения в зависимости от впереди идущего автомобиля без участия водителя, системы помощи при парковке и система предупреждения о сходе с полосы. Автоматизация лишь частична — человек должен держать руки на руле и обязан при необходимости перехватить управление и предотвратить ДТП. На втором уровне автомобиль уже сам может помогать водителю крутить рулем и управлять скоростью и помогать двигаться в полосе. «Автопилот» Tesla как раз на втором уровне, и говорить в этом случае о каких-либо беспилотниках наивно и рано. Следующая ступень — когда автомобиль сам следит за дорогой и не требует постоянного контроля от водителя, и на данный момент компании только планируют выпускать машины с такой автономностью.

Кадр: Whole Mars Catalog / YouTube
Далее начинается вовсе научная фантастика. Автомобиль с четвертым уровнем автономности способен сам добраться из точки А в точку В, но лишь при идеальных условиях. То есть в дождь или снег, например, человек должен будет сам вести машину. Пятый, последний уровень, не требует участия водителя вообще ни при каких условиях. Такие автомобили пока только испытываются, но до них еще далеко.
Проверка на дорогах
Одной из проблем, которая тормозит развитие беспилотников, является техническое и интеллектуальное оснащение автомобилей. В таких машинах устанавливаются датчики для контроля за дорогой — ультразвуковые и оптические сенсоры, лидары, камеры видеонаблюдения. Во-первых, набор технических средств стоит очень дорого, поэтому не каждый автопроизводитель может наладить выпуск умных машин. Во-вторых, у искусственного интеллекта отсутствует понятие разума — совокупности знаний, опыта и понимания нюансов движения на дорогах общего пользования. Из-за несовершенного оборудования автомобиль Tesla в 2016 году попал в смертельное ДТП, так как не смог различить на фоне неба ярко освещенный солнцем трейлер. Летом 2021 года электрокар внезапно замедлился на автомагистрали, приняв Луну за желтый сигнал светофора.
Из этого следуют и связанные с качеством дорожного полотна и указательных знаков проблемы. Беспилотные машины, обученные на тестовых площадках, могут потеряться, выехав в реальный город. Интеллект может ввести в ступор исписанный граффити дорожный знак или яма на дороге. Датчики могут просто запачкаться или оказаться запорошенными снегом — хорошо, если в этом случае «ослепшая» машина ударит по тормозам, а не продолжит движение. В 2018 году беспилотный автомобиль Uber сбил насмерть женщину с велосипедом из-за настройки игнорировать незначительные препятствия вроде парящих над трассой полиэтиленовых пакетов или осенних листьев.
У беспилотника могут возникнуть проблемы из-за человеческого фактора. Например, обученный в идеальных условиях автомобиль четко следует правилам дорожного движения и требует этого же от других участников. Люди всегда будут переходить дорогу в неположенном месте, выскакивать на проезжую часть, пытаться успеть проехать на мигающий желтый сигнал светофора. Автомобильный эксперт Родни Брукс считает, что с нынешним уровнем искусственного интеллекта появившиеся на дорогах общего пользования беспилотники устроят хаос.
Машины будут четко следовать ПДД, игнорируя многочисленные условности, к которым прибегают живые водители. В качестве примера Брукс приводит ситуацию, в которой двое пешеходов остановились на тротуаре у нерегулируемого перекрестка. Как машина поймет намерения людей — хотят ли они перейти дорогу или просто стоят и разговаривают? Как долго машине нужно ждать, пока человек не ступит на пешеходный переход и не закончит свой маневр? Стоит ли объезжать идущего по краю проезжей части пешехода или лучше дождаться, пока он вернется на тротуар?
В разных условиях машина может вести себя по-разному. Если автомобиль постоянно передвигается по городу с нанесенной на дорогу разметкой и стоящими дорожными знаками, то будет ли он следовать правилам, оказавшись за городом? Нарушение целостности дорожного полотна или занесенная снегом разметка могут запутать привыкшего действовать по четким правилам робота.
По словам специалиста Гарвардского университета Сэма Энтони, беспилотники будущего должны уметь решать четыре ключевые задачи. Во-первых, автомобиль должен понимать окружающую среду, во-вторых, воспринимать живых водителей и давать объяснение логике их действий. В-третьих, на основе этой логики беспилотные авто обязаны предоставить решение, в-четвертых, уметь контактировать с другими участниками дорожного движения.
Беспилотники будут оснащены многочисленными сенсорами и общаться друг с другом посредством беспроводной связи. Поэтому одной из проблем машин будущего может быть кибербезопасность. «Как сделать так, чтобы эти автомобили нельзя было взломать?» — задается вопросом Нидхи Калра из исследовательского центра RAND. По мере того как машины становятся умнее и все больше связаны друг с другом, появляется больше способов проникнуть в них и помешать тому, что они делают.
Все будет, но не сразу
«То, что большинство людей представляют себе в виде автономного транспортного средства, вероятно, не станет реальностью в ближайшее время», — считает сотрудник Мичиганского университета Эдвин Олсон. Однако появление машин с набором ряда автономных функций вполне возможно в ближайшие годы. Например, многие современные автомобили умеют самостоятельно парковаться и выезжать с места парковки по сигналу водителя.

Кадр: Яндекс Go / YouTube
Существует прогнозы, что первые ограниченно автономные транспортные средства будут перевозить не людей, а грузы — например, машины курьерских служб или тягачи в карьерах. Также высокий уровень автономности может присутствовать у автобусов, которые из-за конструктивных особенностей и назначения передвигаются по одному и тому же маршруту на сравнительно малой скорости.
Tesla, с которой начиналась речь в начале, уже работает над полностью беспилотным авто пятого уровня. Илон Маск пообещал своим сотрудникам, что компания выпустит машину без руля и педалей. Однако есть и скептики со стороны автопроизводителей. Например, ведущий инженер VW Autonomy Алекс Хитцингер в начале 2020 года заявил, что четвертый уровень автономности может оказаться реальным пределом для производителей машин. «Разработка авто пятого уровня автономности — одна из самых сложных проблем, которые у нас есть. Это сравнимо с полетом на Марс», — заметил Хитцингер.
История беспилотных автомобилей

Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми.

Часть первая
В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства.
Подписывайтесь на каналы:
@AutomotiveRu — новости автоиндустрии, железо и психология вождения
@TeslaHackers — сообщество российских Tesla-хакеров, прокат и обучение дрифту на Tesla
Первые разработки
Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:

Первый автопилот на биплане.
В 1920-х появилось радиоуправление для кораблей:
Беспилотный торпедный катер «Natalie».
Радиоуправляемый автомобиль был впервые представлен компанией RCA в октябре 1921 года в Дейтоне, штат Огайо.
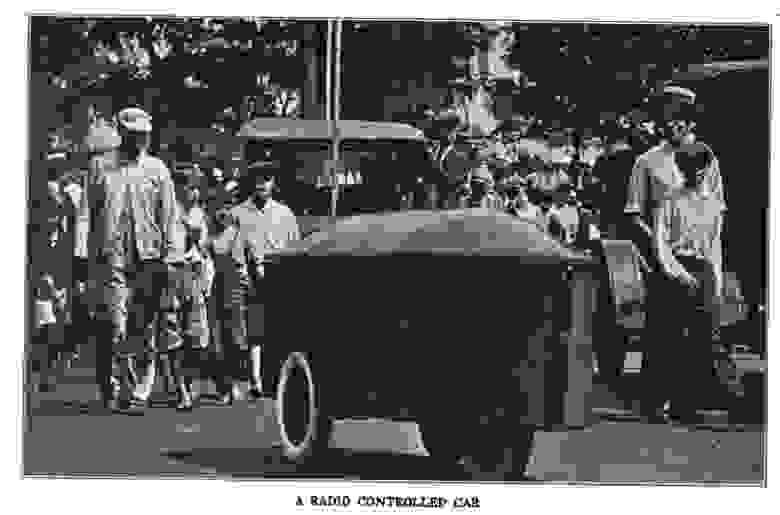
Управление трехколесным транспортным средством осуществлялось беспроводным путем с радиотехнического оборудования на другом автомобиле. Аналогичный радиоуправляемый автомобиль был продемонстрирован в 1925 году на Пятой авеню в Нью-Йорке. За беспилотной машиной вплотную следовал второй автомобиль, в котором находились радиопередатчики и оператор.
Фантастика
Фантазия о беспилотном транспорте почти также стара, как и сам дебют первого автомобиля. А все началось с обыкновенного вымысла.
В 1918 году в одном журнале уже был нарисован трамвай, не управляемый водителем, с подписью: “мечта автомобилиста: автомобиль, который управляется набором кнопок.” В статье говорилось, что “… в будущем автомобиль с рулевым колесом также устареет, как сегодня устарел автомобиль с ручным насосом для газа или масла!»
В 1933 году «Популярная механика» сообщила, что “они ушли в автоматику”, утверждая, что недавние изобретения, например, автоматическое открывание гаражных ворот и гидроусилитель руля, стали первыми шагами на пути к полностью автоматизированным автомобилям; “можно преобразовать автомобиль так, что он будет самостоятельно заводиться, открывать гаражную дверь и съезжать с проезжей части.”
В фильме 1935 года «Самое безопасное место» Chevrolet предсказал, что “если производитель сможет оснастить каждую машину автоматическим механизмом вождения, автомобиль всегда будет делать именно то, что он и должен делать, выезжая на дорогу. При таком управлении автомобиль не сможет выехать с обочины, не подав сигнал и не учитывая встречное движение. При таком управлении автомобиль будет ехать прямо, а не лавировать в потоке машин. С таким управлением он всегда будет перестраиваться в нужную полосу перед поворотом. Будет всегда останавливаться на знак «стоп». С автоматическим механизмом вождения автомобиль будет притормаживать перед тем, как нарушить движение. Он не будет подрезать машины перед опасным поворотом и всегда будет останавливаться перед жд переездом.”
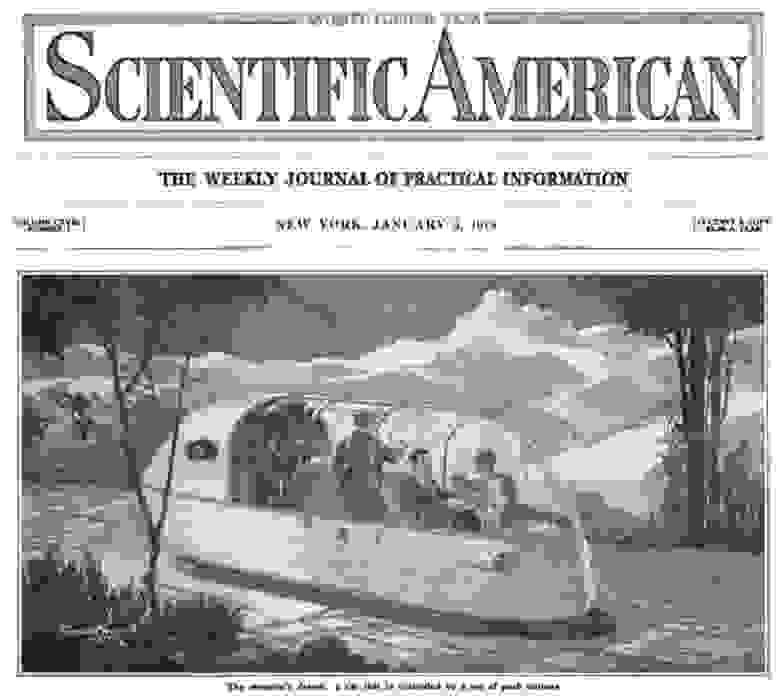
В 1938 году «Популярная наука» в статье «Автострады будущего» предсказала, что через 50 лет аварии будут невозможны, связь между автомобилями будет осуществляться через инфракрасное излучение, а электрические кабели будут контролировать скорость автомобиля и со временем возьмут на себя полное управление автомобилем.
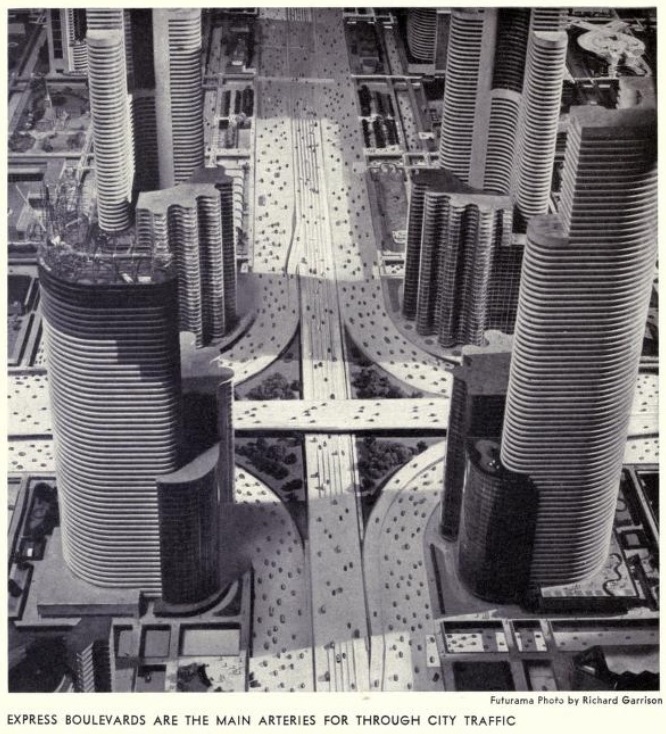
На Всемирной выставке 1939 года в Нью-Йорке General Motors в экспозиции Futurama представил посетителям свое видение 1960 года: автоматизированные транспортные средства на многополосных автомагистралях. Это случилось за 17 лет до того, как Федеральный закон о многополосных автострадах разрешил строительство сети межштатных автомагистралей протяженностью 41 000 миль по всей территории США.
Видео «К новым горизонтам», фильм экспозиции Футурама 1939 года, рассказывает о футуристическом утопическом мышлении накануне Второй мировой войны, которое предсказывал General Motors. В нем запечатлена экспозиция «Футурама» из павильона «К новым горизонтам» General Motors на всемирной выставке, которая устремила свой взор к “чудесному миру 1960-го”.
В 1953 году «Mechanix Illustrated» задал вопрос: “Почему у нас нет… анти-аварийных дорог… С автопилотами, чтобы принять на себя управление вместо вымотанных или пострадавших от аварии водителей? Если изобретатель сможет предложить водителю автопилот для машины, то только подумайте о колоссальной ценности такого устройства. Человеческий фактор будет исключен из процесса вождения. Наши дороги станут практически безаварийными.“ В статье рассматривалась система, основанная на магнитном детекторе, для контроля за боковым движением и радар для соблюдения дистанции.
В 1956 году американские энергокомпании рекламировали, что «в один прекрасный день ваш автомобиль сможет мчаться по электрическому супер-шоссе, его скорость и руление будут автоматически контролироваться электронными устройствами, встроенными в дорогу. Автомобильные дороги станут безопасными благодаря электричеству! Никаких пробок… никаких аварий… никакой усталости водителя.”
В 1956 году для автосалона Motorama General Motors выпустил музыкальный короткометражный фильм „Ключ к будущему“, который ожидал, что в далеком будущем 1976 году будут ездить беспилотные автомобили. В 1958 журнал «Popular Science» писал, что »в вашем будущем автомобиль будет управляться черными ящиками, а вам останется только смотреть», разработкой занимаются GM и RCA.

Firebird III на выставке “Century 21 Exposition”, Сиэтл, 1962 год. Автомобиль должен был управляться с помощью дорожного кабеля, а взаимодействие с инфраструктурой контролировало бы боковое движение.
Firebird IV был не функциональным транспортным средством, как его предшественники, а концепцией, ориентированной на тот день, когда автомобили будут ехать по шоссе и управляться не водителем, а автоматически программируемыми системами наведения, которые обеспечат абсолютную безопасность при развитии скорости более чем в 2 раза от разрешенной сегодня. Как только автомобиль выедет с шоссе, контроль будет передан водителю, и уже он будет вести машину по улицам.
Поп культура
Уолт Дисней вывел воображение на новый уровень.
В эпизоде «Волшебная автострада США» из телесериала 1950-х годов «Волшебный мир Диснея», говорилось о появлении радарных датчиков, ночного видения, системы наведения движения и других футуристических особенностей транспортных средств. Автомобили по-прежнему изображались как существа способные мыслить и чувствовать, принимать собственные решения: в конце 1968 года Дисней создал Herbie, в фильме The Love Bug машина имела «собственный разум и сама собой управляла».
Возможно, самым способным вымышленным роботом-автомобилем в 1980-е годы был KITT из телесериала Knight Rider.
КИТТ управлял собой сам и обладал сканером, который позволял ему «видеть» окружающую среду. Еще больше беспилотных автомобилей появилось в фльмах Christine 1983 года, в Batman 1989-го, Total Recall 1990-го, Demolition Man 1993-го, the Fifth Element 1997-го и I, Robot 2004-го.
Эпоха беспилотных автомобилей началась 100 лет назад. Вдохновленные достижениями в области гироскопических стабилизаторов, радио-и радиолокационных технологий, журналы, газеты и фильмы рисуют автомобили, которые могли бы управлять собой сами. Многие из этих источников ожидали появление технологий примерно через 20 лет, (распространенная временная константа в истории автоматизированных транспортных средств). В то время как изучение беспилотных технологий началось в конце 1950-х — о них речь пойдет в следующей части — потребовалось еще 50 лет, чтобы преодолеть загадочный 20-летний барьер.
Часть вторая: Исследования и разработки
Исследования по созданию беспилотного или роботизированного транспорта начались в конце 1950-х годов. Джеймсон Ветмор подробно описывает 60-летнюю историю создания автоматизированных систем автомобильных дорог в Америке и идеи, лежащие в их основе. Прочитать можно здесь и здесь. В 1958 году General Motors и компания Radio Corporation of America (RCA) совместно проводили испытания автоматизированных прототипов дорог, оснащенных радиоуправляемым контролем скорости и руления автомобиля.

Как писали в 1960 году, магниты, встроенные в транспортные средства, притягивались стальным кабелем, проложенным под дорогой, а диспетчерские вышки следили за общим транспортным потоком. Наступление новой революции казалось настолько неизбежным, что в 1960 году New York Times писал, что к «полномасштабному использованию мы придем через 15 лет».
Впервые сконструированная около 1960-го, Stanford Cart была предназначена для изучения возможности управления луноходом с Земли. В течение последующих десятилетий группа аспирантов дорабатывала карт. Главное усовершенствование внес Ханс Моравек. Он оснастил карт стереозрением, которое позволило ему самостоятельно перемещаться по заполненной стульями комнате — ушло на это всего 5 часов — 1979 год.
Примерно в то же время в центре искусственного интеллекта Стэнфордского исследовательского института Нильс Нильссон разработал Shakey. Это был первый мобильный робот, способный воспринимать окружающую среду через «глаз» телевизионной камеры и с помощью усовидных щупалец. У Shakey также был план действий для выполнения поставленной задачи. Преемником Shakey стал луноход (CMU) Rover, разработанный в Университете Карнеги — Меллона.

Первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба. Исследовательская группа занималась разработкой беспилотных транспортных средств на протяжении 20 лет. В этом документе 1994 года говорится о транспортном средстве, сконструированном компанией Toyota. С помощью одной камеры машина была способна проехать по разметке 50 м со скоростью 50 км/ч.
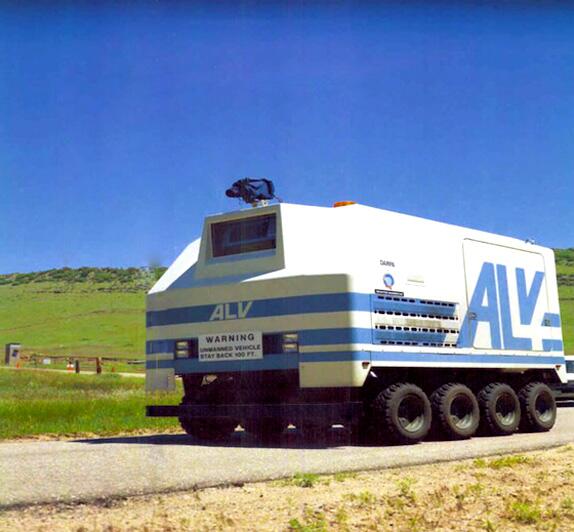
Разработанный в 1980-х годах автономный наземный автомобиль DARPA (ALV) представлял собой восьмиколесного робота высотой 12 футов с несколькими датчиками, перед которым была поставлена задача пройти от точки A до точки B, поднимаясь по холмам без помощи человека. Эксперимент проходил за пределами Денвера в 1985 году.
Это исследование продолжилось в европейском финансируемом государством проекте EUREKA-«Прометей», (PROgraMme для европейского движения с наивысшей эффективностью и беспрецедентной безопасностью), который осуществлялся с 1987 по 1994 год. В него вошли многие европейские участники, а государственное финансирование было значительным.
В 1993 году компания Bosch представила разработанные в рамках проекта «Прометей» навигационные системы и камеры, способные распознавать полосы движения.
Тогда было установлено, что «осмысленное соединение глобальной цифровой карты с локальной сенсорной информацией — ключ к целенаправленному автономному вождению.”
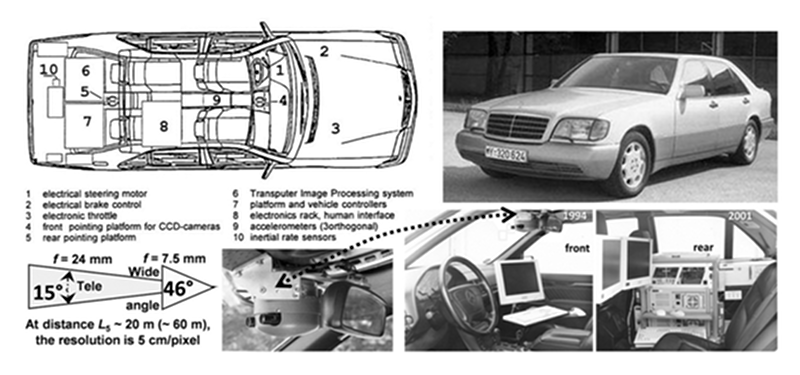
Финальная демонстрация проекта „Прометей“ состоялась на парижской трассе A1, где автомобиль VAmP профессора Дикманнса проехал более 1000 км, развив скорость до 130 км/ч.
Он автоматически пропускал более медленные автомобили в левом ряду и одновременно отслеживал до двенадцати других автомобилей. В 1995 году команда проехала 1758 км от Мюнхена до Дании и обратно со скоростью до 175 км/ч, продольное и боковое управление осуществлялось с помощью компьютерного зрения. Самый большой участок, который удалось проехать в режиме автопилота, составил 158 км. Профессор Дикманс рассказывает о развитии технологий в этой области начиная с 1950-х годов и по настоящий момент на конференции в 2011 году.

Также в 1995 году разработанная в CMU машина Navlab 5 проехала на автопилоте, но с ручным контролем бокового движения, из Питтсбурга, штат Пенсильвания, в Сан-Диего, штат Калифорния, в рамках тура “No Hands Across America”. В этом видео с History Channel 1998 года кратко рассказывается о деятельности CMU Navlab в 1990-е годы:
В 1996 году в Италии, в университете Пармы, Альберто Броджи основал проект ARGO. В 1998 году автомобиль MilleMiglia в рамках тура Automatico проехал в режиме автопилота 2000 км. Отчет команда опубликовала в этом видео 10 лет спустя.
В 1997 году Национальная программа исследования автоматизированных автомобильных систем (NAHS) Министерства транспорта США завершилась тем, что беспилотные автомобили, автобусы и грузовики проехали по трассе I-15 в Сан-Диего, Калифорния.

Контроль за боковым движением осуществлялся с помощью компьютерного зрения и магнитов, встроенных в дорогу. Расстояние между автомобилями регулировали радиолокационные или лидарные датчики.
В немецком исследовательском проекте »Autonomes Fahren», который проходил с 1997 по 2000 год, приняли участие Volkswagen, Bosch, Технический университет Брауншвейга и другие компании.

В рамках проекта на испытательных площадках Volkswagen проводились тест-драйвы производимых автомобилей. Машины были оснащены лидарами, камерами, радарами, GPS, цифровой маршрутной картой.

Чтобы тестируемые машины могли ездить без водителя-испытателя по замкнутому маршруту в смешанном движении среди другого транспорта, в них посадили электромеханических роботов-водителей, которые приводили в действие три педали, переключали передачи и управляли рулевым колесом.

В законе о национальной обороне США от 2001 года говорится, что «цель вооруженных сил состоит в том, чтобы обеспечить применение беспилотных, дистанционно управляемых технологий, так, чтобы… к 2015 году треть оперативных наземных боевых машин Вооруженных сил являлись беспилотными.»
Учитывая назначенный жесткий график, DARPA решило, что соревнование с призовым фондом станет быстрым экономическим выходом и лучшим стимулом для развития инноваций и расширения исследовательского сообщества беспилотных технологий. Первое мероприятие состоялось в 2004 году. Только 15 команд прошли отбор для участия в финальном заезде. Беспилотные самоуправляемые машины попытались пройти по 142-мильному маршруту через пустыню Мохаве (штат Невада), по грунтовым дорогам, равнинам и горным перевалам.
Команды только за 24 часа до начала мероприятия узнали GPS путевых точек. Машина CMU преуспела больше всех, проехав 7,32 мили (менее 5% от всего маршрута). Тем не менее, как правильно заметил Wired, первое из трех соревнований Grand Challenge сформировало сообщество разработчиков беспилотников таким, каким мы его знаем сейчас.

DARPA провела повторное соревнование в 2005 году (DARPA Grand Challenge). Пять команд прошли дистанцию в 132 мили, и все, кроме одного из 23 финалистов, преодолели дистанцию в 7,32 мили — обогнав лучший результат 2004 года.
Робот-автомобиль Stanley, разработанный Себастьяном Труном и его командой из Стэнфордского университета, прибыл на финиш первым, пройдя маршрут за 6 часов 54 минуты. Позже Себастьян рассказал о своей работе в Стэнфорде над Stanley в этой статье и в этой беседе:
Две машины, разработанные в Университете Карнеги-Меллона, Sandstorm и Highlander, прибыли всего через несколько минут после Стэнли. Двенадцать лет спустя команда случайно обнаружит, что фильтр между модулем управления двигателем и топливными форсунками (одной из всего лишь двух электронных частей в двигателе Hummer 1986 года) был сломан и привел к потере мощности двигателя.
Соревнование DARPA Urban Challenge 2007 года DARPA перенесла в городскую местность, на место ныне закрытой военно-воздушной базы Джорджа в Викторвилле, штат Калифорния. Команды должны были пройти маршрут по городу, проезжая через четырехполосные перекрестки, заблокированные дороги или парковки, находясь в смешанном движении с беспилотниками и машинами, управляемыми людьми. Более 90 команд подали заявки на участие в Urban Challenge. 53 команды приняло участие в отборе, 36 были приглашены на полуфинальное мероприятие, и всего 11 приняло участие в финальной гонке.
DARPA сочла необходимым, чтобы в потоке машин рядом с роботами находились люди и представители DARPA, оценивающие производительность роботов. Впервые на мероприятие образовалась пробка из беспилотных автомобилей, а также первое, хоть и незначительное, столкновение двух беспилотников.

Junior Стэнфордского университета и Victor Tango Политехнического университета Виргинии на соревновании DARPA Urban Challenge 2007-го года.

Автомобиль Boss Университета Карнеги-Меллона пересекает финишную черту.
После Urban Challenge проводились ещё несколько, в основном научно-исследовательских, мероприятий. Среди них проект Stadtpilot в Техническом университете Брауншвейг, нацеленный на вождение в городской среде, включая смену полосы движения, парковку и включение в движущийся поток. В 2010 году проект Vislab Intercontinental Autonomous Challenge, в котором колонна из четырех беспилотников, следуя за ведущим автомобилем, проехала 13000 км из Пармы (Италия) до Шанхая (Китай). В 2012 для гонки Pikes Peak в Стэнфорде построили гоночный беспилотник.
Grand Cooperative Driving Challenge – соревнование, проводимое в Европе в 2011 и 2016 годах, в котором машины должны были следовать за лидирующим автомобилем, реагировать на его колебания, совместно стартовать на светофорах и объединяться в колонну.
Соревнование Urban Challenge ознаменовало переход от научных исследований к промышленному развитию — которое мы будем освещать в следующей части. Загадочный 20-ти летний барьер был окончательно преодолен.
Подписывайтесь на каналы:
@AutomotiveRu — новости автоиндустрии, железо и психология вождения
@TeslaHackers — сообщество российских Tesla-хакеров, прокат и обучение дрифту на Tesla
Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.