Устройство автомобилей
Управляемость автомобиля
Управляемость автомобиля – это его способность сохранять заданное направление движения в определенной дорожной обстановке или изменять его при воздействии водителя на рулевое управление.
Основная функция, которую выполняет водитель при транспортных перевозках – управление автомобилем. В системе «водитель-автомобиль-дорога» автомобиль является объектом управления, а водитель – оператором. Анализируя дорожную обстановку, водитель, воздействуя на органы управления автомобилем, изменяет характер его движения.
Различные автомобили отличаются реакциями на управляющие воздействия со стороны водителя. Так поворот рулевого колеса на один и тот же угол на различных автомобилях вызовет различные изменения курсового угла. Усилия, необходимые для поворота рулевого колеса на различных автомобилях тоже неодинаковы.
Управляемость автомобиля оценивают следующими показателями:
Критическая скорость по условиям управляемости
На рисунке 1 приведена схема сил, действующих на автомобиль при его движении на повороте.

Автомобиль будет двигаться по траектории, предусмотренной углами поворота управляемых колес до тех пор, показ не начнется боковое скольжение под действием центробежной (боковой) силы, вызывающей увод автомобиля, т. е. до тех пор, пока сумма продольной и поперечной реакций дороги на колеса не достигнет предела по сцеплению.
В этом случае имеет место равенство:
Продольная реакция дороги Rx1 для заднеприводного автомобиля равна силе сопротивления качению колес переднего моста:
Тогда сила сцепления:
где Rz1 – вертикальная составляющая реакции дороги на колеса переднего моста.
Следовательно, поперечная составляющая реакции дороги на передние колеса может быть определена по формуле:
где G1 – вес автомобиля, приходящийся на передний мост.
где Ру1 – поперечная составляющая торкающей силы Р со стороны ведущего моста;
Рц1 – центробежная сила, действующая на переднюю часть автомобиля.
Исходя из приведенных зависимостей можно записать:
где ρп – радиус поворота, равный расстоянию от центра поворота до середины переднего моста;
v1 – скорость движения середины переднего моста;
m1 – масса автомобиля, приходящаяся на передний мост.
Подставив в уравнение (3) выражения (2), (4) и (5) и решив их относительно скорости, получим:
Если vупр = 0, то автомобиль вообще теряет управляемость, так как при любой отличной от нуля скорости движения происходит поперечное скольжение управляемых колес.
Критическая скорость vупр будет равна нулю, если:
При полном скольжении передних колес (например, в результате торможения) поперечная реакция дороги возникнуть не может, так как возможности сцепления колес с дорогой уже исчерпаны, и автомобиль теряет управляемость даже при самых малых углах поворота управляемых колес.
Управляемость автомобиля и факторы, на неё влияющие о которых желательно знать

Кинематика поворота автомобиля на абсолютно жестких колесах
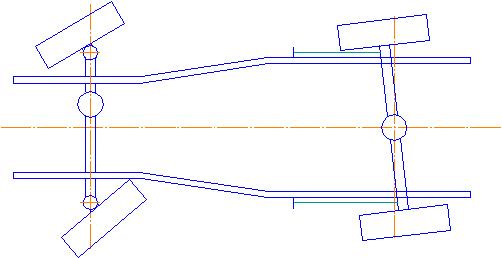
Рулевое управление автомобиля должно обеспечивать такую кинематику поворота, при которой продолжнения осей всех колес пересекаются в одной точке, называемой центром поворота:
Кинематика поворота автомобиля
В обычном понимании шина едет прямо, однако, т.к. она не твердая а эластичная, то деформируется под действием сил. Форма беговой дорожки изкривляется и в реальности шина начинает ехать не туда куда направляется, а отклоняется от этого направления на некий угол δ.
Боковые силы, которые действуют на шину:
Центробежная сила в повороте действует на автомобиль и он в свою очередь на шину. Чтобы вызвать силовой увод, достаточно едва заметно вильнуть рулем.
Тила тяжести (тоже действует на машину) а при наличии уклона дороги в бок вызывает силовой увод шины. Любая дорога должна иметь уклон в сторону обочины. Это закладывается в проект для того чтобы с её поверхности стекала вода. Так же плохие дороги имеют множество неровностей втч таких которые вызывают силовой увод шины.
На сопротивление силовому уводу шины влияют следующие факторы:
Конструкция шины (например радиальная жестче диагональной, но и шины одного типа разной конструкции могут иметь разное сопротивление силовому уводу).
Давление в шине. Чем больше давление, тем меньше силовой увод.
Наличие тяги на колесе. Если ось ведущая, то сопротивление силовому уводу меньше. Чем больше тяга на оси, тем слабее шина может сопротивляться силовому уводу.
Соотношение ширины и высоты профиля. Чем меньше в процентном отношении высота профиля, тем больше сопротивление силовому уводу. По этому если стоит вопрос дилема поставить 15” диски или 16” диски при одинаковом внешнем диаметре колеса, лучше выбрать 16-е даже учитывая что они несколько дороже.
Соотношение ширины профиля шины и ширины диска. Чем шире диск, тем лучше шина сопротивляется силовому уводу. Рационально ставить диски, которые на 20% уже профиля колеса. Например если шина имеет ширину профиля 12.5 дюймов или 315мм, то для неё стоит использовать диски шириной 10J. Среди джиперов принято ставить более узкие диски чтобы уменьшить вероятность разбортировки при стравливании давления для движения по слабым грунтам. Да, всё правильно но принимая такое решение стоит осознавать и отрицательные стороны (чтобы не гадать потом почему машина «рыскает» по дороге на скорости выше 90).
Масса, приходящаяся на колесо. Чем больше масса, тем хуже шина сопротивляется силовому уводу.
Наклон колеса по отношению к плоскости дороги. Сопротивление силовому уводу хуже если колесо наклонено в сторону боковой силы и наоборот.
Угловая жесткость подвески (та самая которая препятствует крену). Чем она больше, тем больше силовой увод шин.
Кинематический увод колеса
Крен кузова может вызвать наклон колеса по отношению к плоскости дороги.
Зависимая подвеска почти не вызывает при крене кузова дополнительный наклон помимо заранее установленной величины развала колес (кроме очень незначительного наклона в результате деформации шин от переноса масс).
Независимая подвеска на двойных поперечных рычагах (ВАЗ-классика, Нива, Митсубуиси Паджеро, Тойота Сурф/Хайлюкс/4Раннер итд) колесо кренится в сторону крена кузова и вызывает дополнительный увод колеса, который на передней поси полезен (но об этом позже).
Независимая подвеска на одном поперечном рычаге (НАМИ-1, на современных автомобилях такая не применяется, лишь её разновидность «на косых рычагах» например на БМВ задняя подвеска) вызывает наклон колеса в сторону, противоположную крену кузова. Такой наклон уменьшает увод, это благоприятно для задней оси.
Макферсон. Как правило вызывает меньший увод чем 2). Так же применима для передней оси автомобиля.
Кинематический увод оси.
Т.к. шарниры рычагов подвески при крене в поворотах описываеют траекторию окружности относительно кузова, то и положение оси относительно кузова меняется. Ось (зависимой подвески) может разворачиваться относительно автомобиля (на большинстве автомобилей так и происходит) и тем самым подруливать в ту или иную сторону. (этот эффект обычно используется для улучшения управляемости).
Поворот автомобиля на эластичных колесах
Если увод передней оси больше увода задней оси, то радиус поворота больше чем был бы на жестких колесах. Такие автомобили называются автомобилями с недостаточной поворачиваемостью. При воздействии боковой силы появляется центробежная сила, которая гасит возмущение. Автомобиль устойчив. Курс немного меняется но коррекция рулем компенсирует возмущение. Автомобиль движется прямо, но передние колеса немного повернуты.
Если увод осей одинаков, то радиус поворота таков каким он был бы на жестких. Такие автомобили называются автомобилями с нейтральной поворачиваемостью. При появлении боковой силы, автомобиль начинает боком «сползать» с дороги. Коррекция рулем легко компенсирует возмузение. Автомобиль движется немного боком по курсу.
Если увод передней оси меньше увода задней, то радиус поврота меньше чем был бы на жестких колесах. При воздействии боковой силы появляется центробежная сила, которая не гасит возмущение. Автомобиль не устойчив. Курс меняется, коррекци рулем возможно (не всегда) компенсирует это изменение. Автомобиль движется боком, передние колеса повернуты.
Это самый неприятный эффект. Реально для водителей выглядит как «рысканье» автомобиля по казалось бы прямой дороге на большой скорости.
Автомобилей с чисто нейтральной поворачиваемостью не бывает. Как увод осей автомобиля меняется и по мере поворота рулевого колеса и в зависимости от крена кузова в повороте. Реальный современный автомобиль должен при любых условиях, любой загрузке, любом маневре иметь определенную недостаточную поворачиваемость. На практике борьба за управляемость выглядит как борьба с избыточной поворачиваемостью. Автомобиль с избыточной поворачиваемостью имеет такое понятие как «критическая скорость» выше которой он способен двигаться по криволинейной траектории без поворота руля. Такой автомобиль опасен если его максимальная скорость выше критической.
Методы борьбы с избыточной поворачиваемостью:
Положительный развал передних колес автомобиля (колеса наклонены наружу).
Увеличение наклона колеса наружу поворота при крене. Этот метод доступен только на независимых подвесках.
Увеличение угловой (против крена) жесткости ПЕРЕДНЕЙ подвески относительно задней. Рекомендуется имеет соотношение угловых жесткостей передней относительно задней в диапазоне 1.4-2.6. Угловая жесткость подвески зависит от:
Рессорной (пружинной) колеи (расстояние между центрами рессор или пружин). Чем больше расстояние, тем больше угловая жесткость. Вот тут проблема т.к. на передней оси как правило поставить пружины/рессоры так же широко как на задней мешают поворотные кулаки. Тут преимущество имеет независимая подвеска т.к. её пружинная/рессорная колея как правило равна колесной.
Вертикальной жесткости подвески. Тут тоже небольшая нестыковочка. Как правило переменность веса груза, приходящегося на заднюю ось заставляет конструктора поставить более жесткие пружины/рессоры сзади а для управляемости желательно наоборот.
Наличия стабилизатора поперечной устойчивости (но это вредная штука, особенно для джипера. При наезде на препятствие только одним колесом, суммарная жесткость складывается из его жесткости и жесткости основного упругого элемента).
На задней оси:
Отрицательный развал задних колес автомобиля (колеса наклонены внутрь). Возможно только на независимой подвеске ведущей задней оси.
Увеличение наклона колес внутрь поворота при крене. Тоже касается только независимой подвески.
Уменьшение угловой жесткости задней подвески
Обеспечение кинематики направляющего устройства, которая бы при повороте подруливала (разворачивала) ось в сторону поворота. Как правило джиперы дорабатывая автомобили самостоятельно, эту кинематику наоборот портят. Например устанавливая в рессоры дополнительные листы или дополня рессоры пружиными чтобы рессора была сильнее выгнутая (а не прямая) в статическом положении. Подвеска при крене начинает наоборот подруливать в сторону противоположную повороту и делать автомобиль склонным к избыточной поворачиваемости. Подробнее о книематике подвеске в статье (Направляющие устройства подвески)
Установка дифференциала повышенного трения в заднюю ведущую ось (например Quaife, дискового, вискомуфты или Торсен).
Разворот задней оси в сторону поворота с целью снижения склонности автомобиля к избыточной поворачиваемости. Если на заднеприводном автомобиле и не применяется этот приём, то по крайней мере не допускается разворот оси в обратную сторону.
Разворот заднй оси автомобиля в сторону поворота
Влияние типа привода на управляемость автомобиля
Склонен к недостаточной повроачиваемости. Т.к. наличие тяги на оси снижает сопротивление силовому уводу шины, то наличие тяги на передней оси увеличивает силовой увод а её отсутствие на задней оси уменьшает силовой увод задней оси получаем автомобиль склонный к недостаточной поворачиваемости, что в общем благоприятно для автомобиля. Если недостаточная поворачиваемость избыточна, её легко уменьшить кинематикой направляющего устройства задней подвески (легче чем наоборот)
Если не брать во внимание кинематику подвески и соотношение угловых жесткостей, то автомобиль с полным приводом имеет поворачиваемость близкую к нейтральной т.к. тяга у него (как правило межосевой дифференциал либо симметричный либо близок к симметричному) распределяется по осям равномерно и силовой увод шин примерно одинаков. Полный привод заметно снижает требования к подвеске автомобиля. Это то, почему постоянный дифференциальный полный привод нужен не только на нестабильных грунтах, но и на сухом асфальте.
Склонен к избыточной поворачиваемости. Это самая сложная задача для конструктора подвесок. Приходится прибегать к целому ряду мер для снижения склонности автомобиля к избыточной поворачиваемости и идти на ряд компромисов. Список таких мер приводится выше.
Управляемость автомобиля. Что нужно знать об этом?
Управляемость автомобиля — это способность транспортного средства изменять или сохранять заданное водителем направление движения при минимальных затратах физической энергии. В связи с этим, управляемость, гораздо больше, чем иные эксплуатационные свойства автомобиля, связана с самими водителем. Для надлежащего обеспечения управляемости транспортного средства его конструктивные параметры и характеристики должны максимально соответствовать психологическим и физиологическим особенностям водителя. Конечно много, что зависит от марки, качества и уровня износа шин. Но мы рассмотрим варианты с новыми шинами, которые сегодня найти не проблема. Достаточно зайти в любой интернет-магазин шин, например mnogoshin.com.ua, и сделать покупку.
Итак начнем… Ведущие колеса, под воздействием толчков и ударов дороги, регулярно отклоняются от заданного направления движения. Свойство автомобиля сохранять нейтральное положение движения и автоматически возвращаться в него называют стабилизацией. Транспортное средство с ненадлежащей стабилизацией колес может произвольно изменять направление движения. Это приводит к тому, что водитель вынужден постоянно поворачивать руль то в одну сторону, то в другую, пытаясь вернуть исходное положение. Ненадлежащая стабилизация требует от водителя постоянных и значительных затрат физической энергии, отрицательно сказывается на устойчивости транспортного средства, значительно повышает износ протектора его шин и рулевого механизма.
Для транспортного средства с хорошей стабилизацией характерно, что его колеса, в процессе выхода из поворота, начинают автоматически возвращаться в нейтральное положение, а сам автомобиль принимает прямолинейное направление движения, даже когда его водитель не держит руки на рулевом.
Наличие бокового увода колес автомобиля оказывает различное влияние на его движение. В зависимости от конструкции, распределения массы по осям, а также показателя сопротивления уводу колес. Когда угол увода у передних превышает данный показатель увода у задних, то он характеризуется недостаточной управляемостью (поворачиваемостью). Подобный автомобиль будет устойчиво сохранять прямолинейное движение. В обратном случае машина считается излишне поворачиваемым, то есть он больше склонен к потере устойчивости и управляемости. И в том и в другом случае ненадлежащая поворачиваемость затрудняет управление, поскольку любое изменение направления движения транспортного средства требует больших затрат. Для получения необходимого значения поворачиваемости транспортного средства некоторые конструкторы уменьшают рабочее давление для передних шин автомобиля в сравнении с задними, а также пытаются разместить его центр тяжести как можно ближе к передней части.
Управляемость автомобиля
Управляемость автомобиля — это его способность легко изменять направление движения при повороте рулевого колеса и удерживать заданное направление движения.
Во время движения автомобиля очень важно, чтобы управляемые колеса не поворачивались произвольно и водителю не нужно было бы затрачивать усилия для удержания колес при движении прямо.
Углы установки управляемых колес
Во время движения автомобиля очень важно, чтобы управляемые колеса не поворачивались произвольно и водителю не нужно было бы затрачивать усилия для удержания колес при движении прямо. Для улучшения устойчивости автомобиля при его движении и облегчения управляемости конструктивно предусматриваются углы установки управляемых колес.
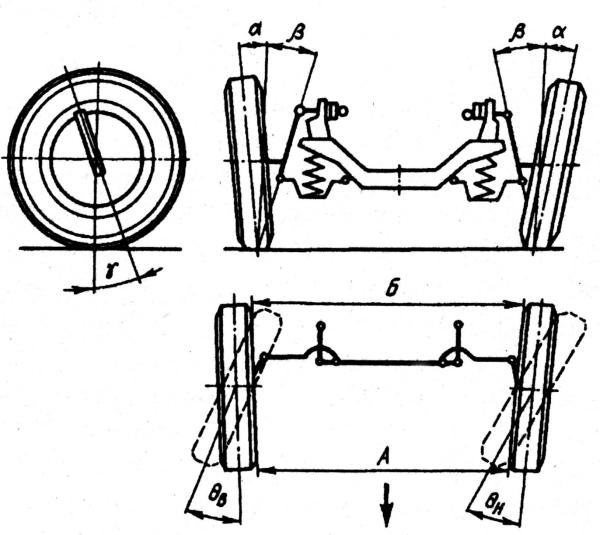
Рис. Углы установки управляемых колес:
γ – угол продольного наклона оси; α – угол развала; β – угол поперечного наклона оси; θв – внутренний угол поворота; θн – наружный угол поворота; А – расстояние между внутренними поверхностями передней части шин; В – расстояние между внутренними поверхностями задней части шин
Угол развала обеспечивает перпендикулярное расположение колес по отношению к поверхности дороги при движении автомобиля, а также передачу сил реакции дороги на внутренний подшипник, что разгружает наружный подшипник колеса меньшего размера, а значит, уменьшает толчки, передаваемые на рулевой механизм.
Угол развала может быть положительным, когда верхняя часть колеса отклонена наружу относительно кузова автомобиля, отрицательным, когда верхняя часть колеса отклонена внутрь, и нулевым, когда плоскость колеса совпадает с вертикалью.
Неправильная установка углов развала колес может являться следствием:
Все вышесказанное относится как к передним, так и к задним колесам автомобиля.
При диагностировании геометрии подвески углы развала колес проверяются всегда, на автомобилях всех марок, а регулировке подлежат лишь в тех случаях, когда это предусмотрено конструкцией.
Угол схождения колес (разность расстояний между внутренними поверхностями задней и передней частей шин переднего либо заднего моста (Б – А)) необходим для того, чтобы обеспечить параллельное качение колес, так как при движении автомобиля из-за установки колес с развалом возникает усилие, способствующее разворачиванию колес на угол 0,5-1,0″ от вертикальной плоскости автомобиля, что приводит к качению колес по расходящимся дугам. Кроме того, угол схождения предохраняет колеса от проскальзывания при наличии люфта в сочленениях рулевых тяг, подшипниках колес.
Схождение колес может измеряться не только в линейных (мм), но и в угловых величинах (градусах), причем в последнее время измерение в угловых величинах предпочтительнее.
Общее схождение может быть положительным, когда расстояние А меньше, чем Б, отрицательным, когда расстояние А больше, чем Б, и нулевым, когда А равно Б. Помимо общего схождения различают индивидуальное схождение для каждого колеса, определяемое как угол между плоскостью колеса и осью симметрии в плане.
Неправильная установка углов развала колес может являться следствием:
Схождение колес измеряется всегда и регулируется на всех марках автомобилей изменением длины рулевых тяг.
Колеса переднеприводных автомобилей обычно имеют небольшое схождение, как положительное, так и отрицательное (порядка ± 2 мм). На заднеприводных, как правило, только положительное при величине не более 5мм.
Угол поперечного наклона оси определяется углом, образуемым осью подвески с вертикальной плоскостью. Такой наклон совместно с углом развала уменьшает расстояние между точкой пересечения геометрической оси подвески с дорогой и точкой центра контакта шины, что уменьшает плечо момента, который необходимо приложить при повороте колес автомобиля, а значит, облегчает управление автомобилем.
При поперечном наклоне шкворня (оси поворота управляемых колес) повернуть колесо вместе с цапфой всегда труднее, чем вернуть его в исходное положение – движение по прямой. Это объясняется тем, что при повороте колеса вместе с цапфой передняя часть автомобиля приподнимается на величину б (водитель прилагает сравнительно большое усилие к рулевому колесу).
При возвращении управляемых колес в положение, соответствующее движению по прямой, масса автомобиля помогает поворачиванию колес и водитель прикладывает к рулевому колесу небольшое усилие.
Как правило, этот угол является положительным и достаточно большим (от +5°до +20°) и в эксплуатации не регулируется.
Угол продольного наклона оси служит для стабилизации управляемых колес моментом, возникающим за счет плеча (расстояние от оси подвески до центра контакта шины) боковой силы.
Благодаря продольному наклону шкворня колесо устанавливается так, что его точка опоры по отношению к оси поворота (оси шкворня) отнесена назад на некоторую величину и колесо всегда стремится занять исходное положение, т. е. положение автомобиля при движении по прямой. При этом колесо находится сзади подвески и тянется за ней, это стабилизирует прямолинейный ход колеса с избегание угловых колебаний его. При движении задним ходом появляется противоположный эффект – колесо толкается подвеской, поэтому рулевое колесо удерживается труднее.
Продольный угол наклона оси поворота может быть положительным, когда ось поворота наклонена в сторону водителя, отрицательным, когда она наклонена от водителя, и нулевым, когда ось поворота совпадает с вертикалью.
Слишком большие углы наклона оси поворота приводят к резкому возрастанию усилий, прикладываемых к рулевому колесу при выполнении поворотов.
Неотрегулированность продольных углов наклона оси поворота приводит главным образом к неустойчивому движению автомобиля. Траектория движения автомобиля отклоняется в сторону того колеса, у которого ось поворота наклонена больше. На большинстве автомобилей разница продольных углов наклона оси поворота левого и правого колес не должна превышать 0°30′.
Углы продольного наклона осей поворота колес подлежат проверке. Возможность регулировки предусмотрена далеко не на всех автомобилях.
Оси поворота колес переднеприводных автомобилей имеют небольшие, обычно положительные углы продольного наклона (порядка +2°…+3°). У заднеприводных автомобилей диапазон изменения этого параметра намного больше (от +2° до +14°).
Разность внутреннего и наружного углов поворота необходима для исключения проскальзывания колес при их повороте.
При заходе автомобиля в поворот происходит постепенное перерастание схождения колес в расхождение благодаря специальной конструкции тяг управления колесом. Колесо внутреннего радиуса поворачивается сильнее, чем наружное, что автоматически усиливает изменение направления и облегчает усилие на руль. Это также необходимо и потому, что на повороте внутренние колеса имеют меньший радиус поворота, чем наружные.
При возвращении управляемых колес в положение, соответствующее движению по прямой, масса автомобиля помогает поворачиванию колес и водитель прикладывает к рулевому колесу небольшое усилие.
Шины с небольшим внутренним давлением воздуха также имеют стабилизирующие свойства, поэтому утлы наклона шкворней в легковых автомобилях меньше или совсем отсутствуют. Однако на автомобилях, где давление воздуха в шинах невелико, возникает боковой увод под действием поперечной силы, вызывающей боковой прогиб шины, при этом колеса смещаются в сторону.
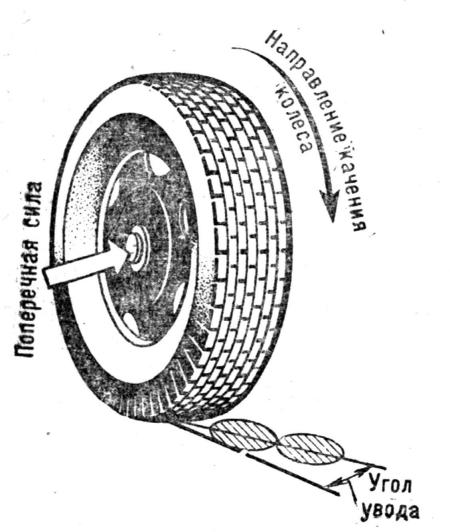
Рис. Схема бокового увода колес
Оба колеса передней оси имеют одинаковый угол увода. При уводе колес радиус поворота увеличивается. При уводе колес задней оси радиус поворота уменьшается. Особенно это заметно, если угол увода задних колес больше, чем передних — стабильность движения нарушается, автомобиль начинает «рыскать», и водителю все время приходится подправлять направление движения. Для уменьшения влияния увода на управляемость автомобиля давление воздуха в шинах передних колес должно быть несколько меньше, чем в задних. Увод колес будет тем больше, чем больше будет боковая сила, действующая на автомобиль (например, на крутом повороте, где возникает большая центробежная сила.
Управляемость автомобиля зависит и от состояния рулевого управления. Во время движения водитель постоянно пользуется рулевым колесом, не выпуская его из рук. Если рулевое колесо необходимо поворачивать с большим усилием, водитель быстрее устает, переставая реагировать на небольшие отклонения автомобиля, срезает углы по-, ворота и этим создает угрозу для безопасности движения. При нарушении регулировки подшипников ступиц передних колес, большом люфте в сочленениях рулевого механизма и рулевого привода, неправильной установке передних колес (схождение и развал) или шинах несоответствующего размера также значительно ухудшается управляемость автомобиля.
Движение автомобиля связано с выполнением различных маневров. Во время поворотов на автомобиль действует центробежная сила, при этом нарушается устойчивость автомобиля и водитель затрачивает значительно больше усилий, чем при движении по прямой. Чем длиннее автомобиль и чем круче повороты, тем больше должна быть ширина поезда.
Благодаря наличию рулевой трапеции передние колеса поворачиваются на неодинаковый угол и катятся без проскальзывания. Если полагать, что задние колеса катятся по следу передних, то радиусом поворота считают расстояние от центра поворота до середины задней оси. Наружным радиусом считается расстояние от центра поворота до крайней передней точки автомобиля, а внутренним радиусом — расстояние от центра поворота до ближайшей точки автомобиля у задней оси.
Минимальная величина радиуса поворота зависит от максимального угла поворота передних колес, который не у всех автомобилей одинаков, а у легковых больше, чем у грузовых.
Для автомобилей с прицепами ширина проезда на повороте должна быть еще больше. В этом случае внутренний радиус поворота определяется по ближайшей точке до центра поворота у задней оси последнего прицепа.
Во время движения на повороте возникает центробежная сила, приложенная в центре тяжести автомобиля. Эта сила направлена по радиусу от центра поворота (рис. 201); ее можно разложить на две составляющие, одна из которых (А) направлена вдоль оси автомобиля, а другая (Б)—в поперечном направлении, стремящаяся опрокинуть автомобиль или вызвать его занос.
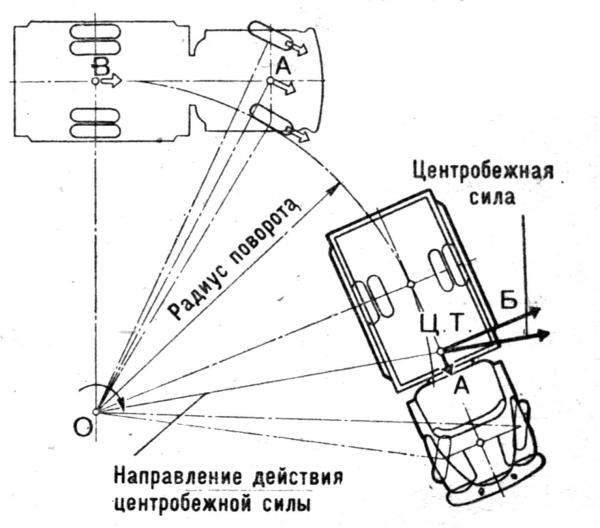
Рис. Разложение центробежной силы на повороте
Поперечную составляющую центробежной силы определяют по формуле
C = Gv2/gR
где С — поперечная составляющая, приложенная к центру тяжести автомобиля, кгс; G — масса автомобиля, кг; v — скорость движения автомобиля, м/с; R — радиус поворота (до середины задней оси), м; g — ускорение свободно падающего тела, м/с2.
Из приведенной зависимости видно, что чем больше масса и скорость движения и меньше радиус поворота, тем больше будет поперечная составляющая центробежной силы и хуже устойчивость автомобиля на повороте. Наибольшее влияние на величину центробежной силы и ее поперечную составляющую оказывает скорость движения, так как в приведенной зависимости она берется в квадрате. Если скорость движения увеличить в 2 раза, то поперечная составляющая центробежной силы увеличится в 4 раза. Чтобы уменьшить центробежную силу на повороте, водитель должен снизить скорость движения.
Занос — это боковое скольжение задних колес при продолжающемся поступательном движении автомобиля вперед. Иногда занос может привести к повороту автомобиля вокруг своей вертикальной оси. Если резко повернуть управляемые колеса, то может оказаться, что инерционные силы станут больше, чем сила сцепления колес с дорогой, а автомобиль занесет, особенно это часто случается на скользких дорогах.
При неодинаковых тяговых силах, приложенных на колеса правой и левой сторон, возникает поворачивающий момент, приводящий к заносу. Непосредственной причиной заноса при торможении являются неодинаковые тормозные силы на колесах одной оси, неодинаковое сцепление колес правой и левой стороны с дорогой или неправильное размещение груза относительно продольной оси автомобиля. Причиной заноса автомобиля на повороте может быть также торможение его, так как при этом к поперечной силе добавляется продольная сила и их результирующая может превысить силу сцепления, препятствующую заносу.

Рис. Схема заноса автомобиля на повороте
Чтобы приостановить начавшийся занос автомобиля, необходимо сразу же прекратить торможение и, не выключая сцепление, повернуть колеса в сторону заноса. После прекращения заноса нужно выровнять колеса, чтобы он не начался в другом направлении.
Чаще всего занос получается при резком торможении на мокрой или обледенелой дороге; особенно быстро наступает занос на большой скорости, поэтому на скользкой или обледенелой дороге и на поворотах нужно уменьшать скорость, не применяя торможение. Кроме заноса, при определенных условиях может возникнуть опрокидывание автомобиля.